Follows IoT Networking and Device Connectivity and extends the Phase 2 embedded-software path from local peripheral buses to low-power IP networking. Use this guide to understand what Thread is, how OpenThread implements it, and how the same stack can run either directly on an MCU or through a Linux host plus radio co-processor.
OpenThread is Google's open-source implementation of the Thread protocol. It is designed for low-power, IPv6-based mesh networking on top of IEEE 802.15.4, which makes it a good fit for battery-powered sensors, smart-home endpoints, industrial nodes, and border-router designs.
Official sources: OpenThread overview, ESP-IDF Thread guide
For roadmap learners, OpenThread is valuable because it sits exactly at the boundary between MCU firmware and networked systems. You cannot treat it as "just another driver" or "just another protocol" because it forces you to think about radio timing, low-power behavior, secure commissioning, IPv6 networking, and Linux-host integration at the same time.
Thread is an IP-based mesh protocol. At the radio layer it uses IEEE 802.15.4, but at the network layer it is still an IPv6 system, which is why a Thread node can fit into normal IP-based tooling much more naturally than many older embedded fieldbuses.
That distinction is important. BLE is excellent for short-range peripheral links, and Wi-Fi is excellent when you need bandwidth, but Thread is built for low-power, many-node, always-available networking where the network can repair itself as routers join or disappear.
OpenThread's official platform documentation describes the stack as implementing the full Thread networking layers, including IPv6, 6LoWPAN, IEEE 802.15.4 with MAC security, Mesh Link Establishment, and Mesh Routing. In practice, that means the stack handles both the radio-facing mechanics and the higher routing behavior that turns many small devices into one stable network.
Official source: OpenThread features
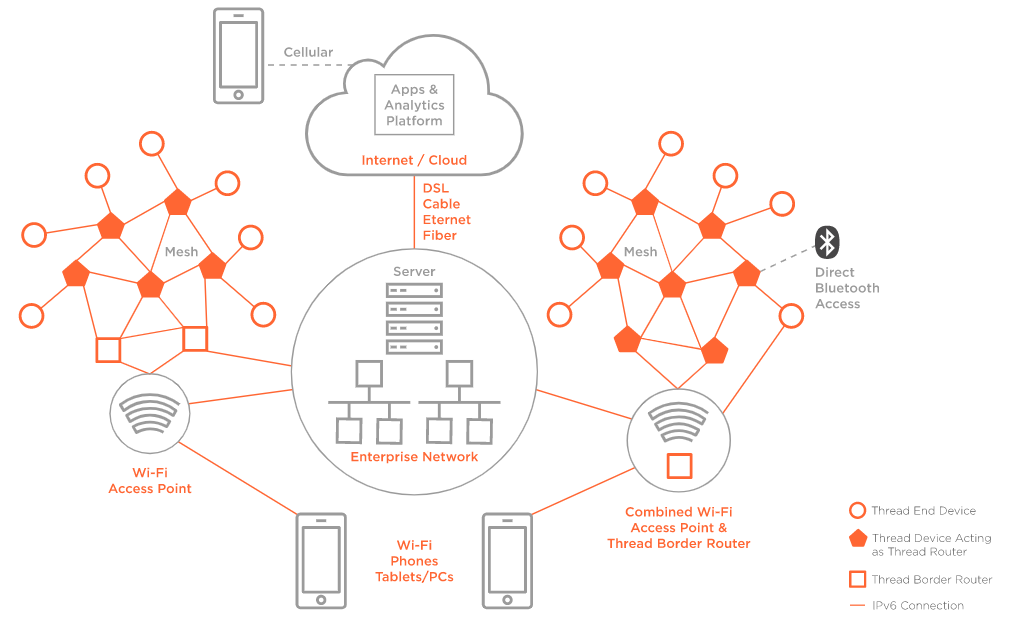
Official reference topology image showing the main Thread roles and how a border router connects the mesh to the wider IP network. Source: Silicon Labs Thread Fundamentals.
OpenThread is easiest to understand if you read it as a layered stack:
| Layer | What it does |
|---|---|
| IEEE 802.15.4 PHY/MAC | Defines the low-power radio link, frame format, channel use, acknowledgements, and MAC-layer security |
| 6LoWPAN | Compresses IPv6 headers so IPv6 packets fit efficiently over a tiny 802.15.4 frame budget |
| IPv6 | Gives each node a real IP identity instead of a proprietary application-only address model |
| UDP / ICMPv6 / higher services | Supports messaging, discovery, and management above the network layer |
| Thread control plane | Handles network formation, partition recovery, roles, commissioning, and mesh routing |
The important engineering idea is that Thread is not a "small custom sensor protocol." It is a constrained IP network. That is why it fits so naturally with border routers and Linux hosts, and why host tools such as ot-ctl and OTBR can manage it without inventing an entirely separate networking world.
6LoWPAN matters here because raw IPv6 packets are too large and verbose for a small 802.15.4 frame budget. Thread stays IP-native by compressing and fragmenting traffic where needed instead of abandoning IPv6.
6LoWPAN stands for IPv6 over Low-Power Wireless Personal Area Networks. It is an IETF-defined adaptation layer that lets constrained devices carry IPv6 traffic over small, low-power links such as IEEE 802.15.4 instead of requiring a completely separate non-IP protocol stack.
This is the core reason Thread can present itself as a real IP network even though it runs on a tiny radio. A normal IPv6 packet assumes a much larger and more capable link than 802.15.4 provides, so 6LoWPAN sits between the MAC layer and the IPv6 layer and reshapes traffic to fit the medium.
A plain IPv6 header is large relative to the frame size available on 802.15.4 links. 6LoWPAN reduces this cost by compressing fields that are predictable, shared, derivable from context, or repeated across the network. In a well-formed low-power mesh, many of those fields do not need to be sent in full every time.
That means the radio spends less airtime carrying protocol overhead and more airtime carrying useful application payload. For battery-powered devices, this is not just a bandwidth optimization; it directly affects energy use, latency, and how often the radio has to stay awake.
IPv6 requires a minimum MTU of 1280 bytes, but IEEE 802.15.4 frames are far smaller. 6LoWPAN handles this mismatch by fragmenting larger packets into smaller radio frames and reassembling them on the receiving side.
This is another reason Thread feels like a real IP network even on constrained devices. The application can still think in terms of IPv6 communication, while the adaptation layer handles the ugly details of fitting those packets onto a much smaller link.
From an embedded-systems point of view, 6LoWPAN is the translation layer between "tiny radio world" and "IPv6 world." It is not a replacement for IPv6 and not a separate application protocol; it is the mechanism that makes IPv6 practical on low-power personal area networks.
In the Thread stack, this is what lets you keep standard IP ideas such as IPv6 addressing, UDP, service discovery, and border routing without pretending that the radio is as capable as Ethernet or Wi-Fi. That is why Thread can integrate cleanly with Linux hosts, OTBR, and IP-based tools instead of requiring a proprietary gateway protocol everywhere.
6LoWPAN is designed for devices that may sleep often, wake briefly, and still need to participate in a routed network. It works well with low-power mesh behavior because it reduces transmission overhead and keeps the radio cost of IP communication manageable.
This is why it shows up so often in smart-home, industrial, and sensor-network deployments. The combination of IEEE 802.15.4, 6LoWPAN, IPv6, and Thread routing gives you a network that is low-power, self-healing, and still understandable through mainstream networking concepts.
Once IPv6 is made practical by 6LoWPAN, the next question is what transport and control protocols ride on top of it. In practice, UDP and ICMPv6 are the two most important ones to understand first.
OpenThread's overview explicitly presents the stack as supporting IPv6, UDP, CoAP, and ICMPv6, which is a strong hint about how real applications are expected to use the network. UDP is the usual transport for application traffic, while ICMPv6 handles core network-control tasks such as diagnostics and parts of IPv6 control behavior.
Official source: OpenThread overview
UDP is the common transport choice in low-power Thread systems because it is lightweight and connectionless. A battery-powered sensor does not want the complexity and ongoing state cost of a heavier transport unless it truly needs it, so application protocols such as CoAP are commonly built on UDP instead of TCP.
RFC 6282 matters here because it defines LOWPAN_NHC, the next-header compression format used after the compressed IPv6 header. That RFC specifically defines compression for UDP, which is one reason UDP fits so naturally in 6LoWPAN networks.
Official source: RFC 6282
UDP compression matters in two practical ways:
- the header can be compressed beyond the normal 8-byte UDP form
- a specific port range (
0xf0b0to0xf0bf, decimal61616to61631) can be compressed very aggressively
That is not just a protocol curiosity. On a tiny low-power frame budget, saving a few bytes repeatedly can materially reduce airtime and power use.
One nuance is worth stating clearly: with IPv6, the UDP checksum is normally mandatory. RFC 6282 allows checksum elision only under restricted conditions, with upper-layer authorization and an additional integrity check. So the correct mental model is not "6LoWPAN removes reliability checks," but rather "6LoWPAN allows carefully controlled header-size tradeoffs when the rest of the system can still guarantee integrity."
ICMPv6 is not optional background noise. It is part of how an IPv6 network remains manageable. In low-power Thread systems, it is still used for diagnostics and core control behavior, including things like echo requests (ping) and IPv6 control interactions.
But standard IPv6 Neighbor Discovery relies heavily on multicast, and that is a bad fit for sleepy low-power wireless networks. RFC 6775 exists exactly because unmodified IPv6 Neighbor Discovery is inefficient and sometimes impractical in a 6LoWPAN due to heavy multicast use and non-transitive wireless links.
Official source: RFC 6775
So in 6LoWPAN systems, ICMPv6 is still present, but the surrounding discovery behavior is adapted for constrained networks. This is why low-power IP networking is more than just "run IPv6 on a small radio" — the control behavior also has to be reshaped for sleepy, lossy, battery-powered nodes.
UDP and ICMPv6 together are what make Thread devices feel like first-class IP nodes instead of proprietary endpoints behind a custom gateway. UDP carries the application traffic, while ICMPv6 and the optimized IPv6 control behavior keep the network diagnosable and operational.
That combination is one of the biggest reasons Thread integrates cleanly with Linux hosts and border routers. You are not inventing a special application protocol and then tunneling it through a gateway; you are still operating in an IPv6 world, just an adapted one.
The data plane moves packets. The control plane decides how the mesh forms, which nodes trust each other, which paths are good, and how network-wide information is distributed.
In Thread, the core control-plane mechanism is Mesh Link Establishment (MLE). OpenThread's Thread primer states that MLE is used to configure links and disseminate information about the network to Thread devices.
Official source: OpenThread Thread Primer: Network Discovery and Formation
MLE is the protocol that helps a device move from "I hear something on the radio" to "I am securely attached to this mesh and understand my parent, leader, and route context." The OpenThread primer lists these MLE responsibilities:
- discover neighboring devices
- determine link quality
- establish links to neighbors
- negotiate link parameters such as device type, frame counters, and timeout
The same primer also explains that MLE disseminates:
- leader data
- network data
- route propagation information
This is why MLE is best thought of as the glue of the Thread control plane. It is not only about one link coming up; it is also how the mesh shares enough state for the whole network to stay coherent.
OpenThread's Thread primer explicitly says that route propagation in Thread works similarly to RIP, a distance-vector routing protocol. That gives you a useful mental model: routers exchange route-related information and choose paths based on distributed cost knowledge rather than relying on one central controller.
Official source: OpenThread Thread Primer: Network Discovery and Formation
This matters because it explains why Thread can be self-healing. If one router disappears, the rest of the control plane can still converge on new parent relationships and route choices without an operator manually rebuilding the network.
Every Thread partition has exactly one Leader. The Leader is still a router, but it has the extra responsibility of managing the router set and coordinating information such as Router ID assignments and partition state.
Official source: OpenThread Thread Primer: Node Roles and Types
This role is dynamic, not permanently hard-wired to one device. When a network is first formed, the first router can elect itself Leader. If that Leader disappears, another router can take over automatically, which is one of the reasons Thread does not need a permanently managed central controller for normal mesh operation.
Official sources: OpenThread Thread Primer: Network Discovery and Formation, OpenThread API codelab
The practical engineering lesson is that Leader loss is supposed to be a recoverable network event, not a catastrophic outage. You still need stable radios and power, but the control plane is designed so one node disappearing does not destroy the entire mesh.
OpenThread's CLI and Commissioner state model also make it clear that leadership and commissioning are managed roles, not one-time fixed properties. A Commissioner can enter a petitioning state before becoming active, and a Leader can be replaced if another router needs to take over partition management.
Official sources: OpenThread CLI reference, OpenThread Commissioner API
Thread does not want every Full Thread Device to become a router all the time, because that would waste power and increase unnecessary control traffic. OpenThread's role documentation says Thread tries to keep the number of routers in a healthy operating band rather than simply maximizing it.
Official source: OpenThread Thread Primer: Node Roles and Types
This is where the Router Eligible End Device (REED) role matters. A REED can attach as an end device first and then promote itself to a router if the network needs more routing capacity. OpenThread's primer notes that when the router count is below the preferred threshold, a REED can automatically upgrade itself; when conditions change, a router without children can also downgrade back toward an end-device role.
Official sources: OpenThread Thread Primer: Node Roles and Types, OpenThread Thread Primer: Router Selection
That is why Thread is both stable and economical. It can add routing capacity when needed, but it does not force every capable node to stay in the most expensive role forever.
One subtle but important point from the OpenThread primer is that MLE only proceeds once a device has obtained Thread network credentials through Thread commissioning. In other words, secure admission to the network happens first, and only then does the device participate fully in the mesh-control machinery.
This separation is good system design. Commissioning answers "is this device allowed in?" while MLE answers "now that it is allowed in, how does it attach and learn the mesh?" Mixing those two ideas together makes Thread harder to reason about.
A Thread network is not flat. Nodes take on different roles depending on whether they route traffic, sleep aggressively, or coordinate parts of the mesh.
The Leader manages key network-wide state such as partition information, configuration data, and router-set management. It is not a permanent boss node; if it disappears, another router can take over, so the network can survive node loss without manual intervention.
Official sources: OpenThread Thread Primer: Node Roles and Types, OpenThread API codelab
Routers forward packets for other devices and keep the mesh connected. They are the infrastructure of the Thread network, so they are normally mains-powered or at least less aggressively power-constrained than sleepy endpoints.
A REED is not routing yet, but it can become a router if the network needs more routing capacity. This makes the network adaptive instead of requiring every node to be manually assigned a role up front.
OpenThread's role documentation is very clear on why this exists: Thread tries to keep router count in a useful band, and a REED can promote itself when routing capacity is low. Conversely, a router that no longer has children may later downgrade, which helps keep the control plane lean instead of over-populating the mesh with always-on routers.
Official sources: OpenThread Thread Primer: Node Roles and Types, OpenThread Thread Primer: Router Selection
End devices attach through a parent router instead of forwarding mesh traffic themselves. Sleepy end devices go further and spend most of their time asleep, which is how Thread supports long battery life without giving up network reachability.
The key point is that a Sleepy End Device (SED) does not participate in routing and does not keep its radio on continuously. Instead, it depends on a parent router to act as its always-on representative. The parent buffers data while the SED sleeps, and the SED wakes periodically to poll for pending traffic.
Official source: OpenThread Thread Primer: Node Roles and Types
This is one of the most important energy-saving ideas in Thread. The network stays reachable because the parent remains active, while the battery-powered child only pays the radio cost periodically. If you are designing for low average current, understanding this parent-buffering and poll model is essential.
OpenThread's advanced-feature guide explains this as indirect transmission: the parent holds data until the sleepy child asks for it. That same guide also notes that the sleepy end device periodically wakes to poll its parent, and OpenThread uses frame-pending behavior to indicate whether queued data exists.
Official source: OpenThread advanced features
That polling model is the practical answer to the low-power problem. The SED does not burn power listening all the time, and the network does not lose reachability because the parent router serves as the always-on proxy for inbound traffic.
A Border Router connects the Thread mesh to other IP networks such as Ethernet, Wi-Fi, or USB-backed Linux interfaces. A Commissioner is responsible for onboarding and authorizing new devices, which is why Thread setup is a network-management problem, not just a radio problem.
In practice, the Commissioner is part of the secure admission path. It does not simply "notice" a device and allow it in; it is involved in the explicit commissioning process that authorizes a Joiner and transfers the right credentials.
One reason OpenThread is so widely used is that it supports multiple deployment models instead of forcing every product into the same software split. The OpenThread platform documentation explicitly calls out both SoC and co-processor designs.
Official source: OpenThread platforms
In a System-on-Chip design, the radio, OpenThread stack, and application all run on the same MCU or wireless SoC. This is the most common approach for end devices because it is low-cost, low-power, and direct: your firmware calls the OpenThread APIs locally and the same chip drives the radio.
This is the model you use when the device itself is the product, such as a battery sensor, light switch, or smart plug. In ESP-IDF, the openthread/ot_cli example is a good mental model for this path.
In a Network Co-Processor design, the host application talks to a co-processor using the Spinel protocol. OpenThread can run partly on the host side, with the network-facing device behaving like a dedicated networking component rather than the main application processor.
This split is useful when a stronger host CPU exists already and you want the network function separated from the application logic. It also makes host-side development easier because large application changes do not require rebuilding the radio firmware every time.
In a Radio Co-Processor design, the host processor runs the core OpenThread stack while the attached device handles the minimal radio-facing work. OpenThread's official co-processor documentation describes this as the host keeping the protocol logic while the device acts as the Thread radio controller, usually connected over SPI or UART using Spinel.
Official sources: Co-Processor Designs, OT Daemon
This is the model that matters most for Linux gateways and Jetson-class systems. It lets a Linux host run OTBR or ot-daemon, while a small MCU or radio SoC provides the 802.15.4 link.
OpenThread is intentionally written so the networking core is portable across many chips and operating systems. The OpenThread platform guide describes it as portable C/C++ with a narrow Platform Abstraction Layer (PAL), which is why the same core can run on bare-metal systems, FreeRTOS, Zephyr, Linux, and macOS.
Official source: OpenThread platforms
The PAL is the contract between the OpenThread core and the underlying hardware port. The OpenThread porting guide lists the major PAL areas as:
- alarm/timer services
- bus interfaces such as UART or SPI
- IEEE 802.15.4 radio interface
- entropy / random source
- settings storage
- logging
- system-specific initialization
Official source: Platform Abstraction Layer APIs
This matters because it tells you what "porting OpenThread" really means. You are not rewriting the mesh stack from scratch. You are implementing the hardware-facing interfaces correctly so the portable upper layers can trust your radio, timer, storage, and transport behavior.
ESP-IDF exposes Thread support through its openthread component and documents several official examples:
openthread/ot_cliopenthread/ot_rcpopenthread/ot_bropenthread/ot_trel- sleepy-device examples
Official source: ESP-IDF Thread guide
This is the key practical point for the roadmap: ESP32-C6 can be used either as a full Thread node or as an RCP attached to a Linux host. That makes it unusually good for study, because the same silicon can teach you both MCU-side Thread firmware and host-plus-radio architectures.
ESP-IDF also exposes the OpenThread lifecycle through functions such as:
esp_openthread_init(...)esp_openthread_auto_start(...)esp_openthread_launch_mainloop(...)
These APIs show the embedded control flow clearly. First you initialize the platform and stack, then optionally start with a dataset, then enter the main loop that services radio events, timers, and protocol work.
The OpenThread CLI is not just a demo shell. It is one of the fastest ways to understand what state the stack is in, how a node forms a network, and what role it currently holds.
For SoC designs, the CLI usually runs directly on the device. For host-plus-RCP designs, the host talks to the radio through Spinel, which OpenThread describes as the standard host-controller protocol used by both RCP and NCP designs.
Official source: Co-Processor Designs
When the host side is POSIX or Linux, OpenThread Daemon (ot-daemon) is the lightweight service wrapper around this model. The OpenThread docs show that it runs as a service, exposes a UNIX socket, and can be controlled with ot-ctl. This is the cleanest way to understand a Linux host talking to a serial Thread radio without bringing in the full Border Router stack immediately.
Official source: OT Daemon
In OpenThread CLI, a dataset is the bundle of parameters that defines a Thread network. The official dataset reference says Thread network configuration is managed using Active and Pending Operational Dataset objects.
Official source: Display and Manage Datasets with OT CLI
The Active Operational Dataset contains the parameters that are actually in use across the network, including items such as:
- channel
- extended PAN ID
- mesh-local prefix
- network name
- PAN ID
- PSKc
- security policy
That means dataset commands are not random helper commands. They are how you inspect or construct the network identity and credentials that define a Thread mesh.
When you create a brand-new standalone Thread network in the lab, the common sequence is:
dataset init new
dataset
dataset commit active
ifconfig up
thread start
stateOpenThread's on-mesh commissioning guide shows exactly this pattern: dataset init new, inspect the generated values, dataset commit active, then bring the interface up and start Thread.
Official source: On-Mesh Commissioning
What these commands mean:
dataset init new: create a fresh working dataset with new generated network parametersdataset: display the current dataset contents in the CLI bufferdataset commit active: save that dataset as the Active Operational Datasetifconfig up: bring up the IPv6 interfacethread start: actually start protocol participation in the meshstate: show whether the node becameleader,router,child, and so on
The important mental model is that the dataset is the network definition, while thread start is the act of actually participating in that network.
The dataset reference includes an important warning: directly editing Active or Pending Operational Datasets through CLI is mainly for the first device in a new network or for testing. In production systems, dataset changes should be managed through the proper commissioning and management mechanisms rather than arbitrary local edits.
Official source: Display and Manage Datasets with OT CLI
That is a useful distinction for learners. CLI dataset commands are excellent for understanding the protocol and forming a lab network, but real products should not treat every field device like an unrestricted network-admin shell.
Once you move from a standalone ot_cli node to a Linux host plus RCP design, the most useful skill is learning how to read a mixed snapshot made from:
ot-ctloutput- Thread IPv6 addresses
- OTBR log lines
For example, a real Jetson plus ESP32-C6 RCP session may show:
extaddr: fac5eb4acbada19e
rloc16: a400
ipaddr:
fd3f:d825:5faf:9782:0:ff:fe00:a400
fd3f:d825:5faf:9782:8b89:772a:39cd:737a
fe80::f8c5:eb4a:cbad:a19e
state: detached
This kind of output already tells you a lot:
extaddris the 64-bit IEEE 802.15.4 identity of the radio.rloc16is the compact 16-bit mesh locator used inside the Thread network.- the first
fd...ff:fe00:a400address is the RLOC IPv6 address, built from the mesh-local prefix plus the router locator. - the second
fd...8b89:...address is the Mesh-Local EID, the node's more stable IPv6 identity inside the mesh. - the
fe80::...address is the normal IPv6 link-local address.
The subtle point is that seeing valid Thread addresses does not automatically mean the node is fully attached. A node can have a dataset, mesh-local addresses, and Linux interface state while still reporting detached.
That is why the state machine matters:
disabledmeans the Thread stack is present but not started.detachedmeans the stack has been started and is trying to attach or form a partition, but it is not yet in an attached role such asleader,router, orchild.leadermeans the node is attached and currently managing its own partition.
Now look at the matching OTBR log style:
Mle-----------: Send Link Request (ff02::2)
MeshForwarder-: Sent IPv6 UDP msg ... dst:[ff02::2]:19788
Settings------: Read NetworkInfo {rloc:0xa400, extaddr:..., role:leader, ...}
BorderAgent---: Registering service OpenThread BorderRouter #A19E _meshcop._udp
These lines map directly back to the OpenThread concepts from earlier sections:
Mle-----------is the Mesh Link Establishment control plane trying to discover or attach to routers.MeshForwarder-shows that the radio path is actually transmitting Thread control traffic.Settings------means OpenThread is reading or writing persisted network state from non-volatile storage.BorderAgent--- ... _meshcop._udpmeans the commissioning-facing Border Agent service is being registered.
One log line often confuses people:
Settings------: Read NetworkInfo { ... role:leader, ... }
That line describes persisted state, not guaranteed current live state. A node can read back old information saying it was previously a leader and still report detached right now because the live attach procedure has not completed.
Another family of lines worth understanding is:
P-Daemon------: Session socket is ready
P-Daemon------: Daemon read: Connection reset by peer
In a normal lab workflow, that often just means a client such as ot-ctl connected to the UNIX control socket and then exited. It is not automatically evidence of a radio problem.
The engineering lesson is simple: a healthy OpenThread system is not diagnosed from one line. You read:
- CLI state such as
disabled,detached, orleader - address state such as
extaddr,rloc16, andipaddr - control-plane log lines such as
Mle----------- - persistence lines such as
Settings------
Together, these tell you whether you are debugging:
- a dead radio or transport link
- a dataset / startup problem
- a live-but-detached attach problem
- or a fully formed partition
This same reading method becomes especially important in the Jetson RCP path, where Linux, OTBR, Spinel, and the radio coprocessor each contribute part of the visible system state.
One very useful real-world lesson from the Jetson plus ESP32-C6 RCP path is that Thread success and full OTBR success are not the same milestone.
In the validated Jetson lab run for this roadmap, the sequence eventually became:
Role detached -> leader
Allocate router id 41
Partition ID 0x1a1d09c0
Route table ... me - leader
Those lines are extremely important. They mean:
- the host talked successfully to the RCP over Spinel
- MLE attach logic completed
- the node formed its own partition
- the node became leader of a one-node Thread network
From the OpenThread protocol point of view, that is a real success. The control plane worked, leader election worked, the dataset was usable, and the node transitioned out of detached into an attached role.
But immediately after that, the Linux-host side tried to bring up more advanced Border Router behavior and hit:
InitMulticastRouterSock() ... Protocol not available
That failure is not a Thread-state failure. It is a Linux kernel capability failure. In this case, the Jetson kernel did not have multicast-routing support enabled:
# CONFIG_IP_MROUTE is not set
# CONFIG_IPV6_MROUTE is not set
This distinction matters a lot for learners:
- OpenThread itself was functioning.
- The ESP32-C6 RCP path was functioning.
- Leader formation and partition creation were functioning.
- Full OTBR border-routing features were blocked by host-kernel configuration.
That is exactly why host-plus-RCP debugging must be read in layers. A system can be:
- healthy as a Thread node
- healthy as an RCP host link
- but still blocked as a full Border Router product
Practically, this means a Linux host may still be perfectly usable with ot-daemon or for protocol learning even when full OTBR border-routing features are unavailable on the current kernel image. The network stack and the border-router product stack overlap, but they are not identical.
Thread is designed for real deployments, not one-off lab links. OpenThread's public description emphasizes reliable, secure, low-power device-to-device communication, and the stack includes IEEE 802.15.4 MAC security, secure commissioning, and border-router support.
Official source: OpenThread overview
The important thing to understand is that OpenThread security is layered, not a single checkbox. Different protections apply at different points in the system:
- Link-layer protection: IEEE 802.15.4 frames are protected with MAC security.
- Commissioning protection: a new device must be authorized before it joins the mesh.
- Application / end-to-end protection: application traffic can use higher secure protocols such as DTLS-backed Secure CoAP.
OpenThread's porting guide explicitly states that OpenThread Security uses AES-CCM cryptography to encrypt and decrypt IEEE 802.15.4 or MLE messages and validate their integrity. In practice, that means packets are not just hidden from casual inspection; they are also authenticated so modified packets can be detected instead of silently trusted.
Official source: OpenThread advanced porting features
This matters for embedded developers because the crypto is not abstract "cloud security." It depends on the local platform port doing the right thing with entropy, nonces, and key handling. If your entropy source is weak or your PAL implementation is careless, the security model weakens even if the high-level Thread code is correct.
Thread does not let random devices join just because they are in radio range. OpenThread's Border Agent API documentation states that commissioner candidates establish secure DTLS sessions with the Border Agent using PSKc, and only then can a connected commissioner petition to become a full commissioner.
Official source: OpenThread Border Agent API
On the device side, OpenThread Commissioner APIs and OTBR tools use PSKd or Joiner credentials to authorize specific joining devices. The practical lesson is simple: joining the network is a controlled admission process, not a broadcast "pair with anything nearby" flow. That is one of the main reasons Thread is suitable for real smart-home and industrial products instead of hobby-only mesh links.
Official sources: Commissioner API, OTBR PSKc tools
At a system level, commissioning answers a very specific question: how can a device that is not yet a trusted member of the network receive the credentials it needs without those credentials being exposed in plaintext over the air?
The broad flow is:
- a Commissioner is authorized to act on the network
- a Joiner is identified by Joiner credentials such as PSKd
- DTLS is used to protect the admission conversation
- after the secure exchange succeeds, the Joiner receives the operational data it needs and can then proceed to normal Thread attachment
This separation is important. The Joiner is not considered a full mesh participant first and secured later. Security is part of the admission path itself, which is much stronger than the common IoT anti-pattern of letting devices connect provisionally and trying to lock them down afterward.
Once commissioning finishes, normal MLE-based attach and control-plane behavior can begin. That is why the OpenThread primer explicitly notes that MLE only proceeds after Thread commissioning has provided network credentials.
Official source: OpenThread Thread Primer: Network Discovery and Formation
One subtle point is worth stating clearly because many summaries get it wrong: the OpenThread commissioning guide says the Commissioner authenticates the Joiner, but the Commissioner does not itself "own" or manually hand out the Thread network key as an application secret. Its job is to authorize admission into the network's secure onboarding flow.
Official source: OpenThread on-mesh commissioning
In external commissioning flows, the Border Router, Border Agent, Commissioner, Joiner Router, and Joiner all play different roles. The practical mental model is that a device outside the mesh can still be securely commissioned because the network provides relay and authorization machinery around the DTLS-protected exchange, rather than expecting the unauthenticated Joiner to behave like a normal mesh node first.
Two very similar names show up in Thread onboarding and they are easy to mix up:
- PSKd: the Joiner credential used to authenticate the device that wants to join
- PSKc: the credential used by the Commissioner / network side during commissioning setup
OpenThread's external-commissioning guide states that the Joining Device Credential may also be called the Joiner Password or PSKd, and that it can be combined with the device's EUI-64 to generate a unique QR code.
Official source: Prepare the Thread Network and Joiner Device
This is why two companies do not need to pre-share secrets globally during manufacturing. Company A, which makes the Thread end device, ships the device with its own Joiner credential and identity information. Company B, which makes the border router or ecosystem app, only needs to implement the standard Commissioner flow so that the installer can scan or enter the device's credential at onboarding time.
In a real cross-vendor deployment, the user-facing flow is usually:
- Company A prints a QR code or passphrase label for the device.
- The installer scans that code in a Commissioner-capable app.
- The Commissioner is authorized onto the Thread network.
- The Joiner is authenticated using its PSKd.
- The Joiner receives Thread network credentials and then attaches normally.
This is the key interoperability point: cross-company onboarding works because the roles and credential semantics are standardized, not because every vendor shares one global PSKd database.
Thread's built-in mesh protections do not remove the need for application-level security. OpenThread's Secure CoAP documentation shows that Secure CoAP uses DTLS to establish secure end-to-end connections between peers.
Official source: Secure CoAP CLI concepts
That distinction is important. Link-layer security protects the radio hop and the mesh transport, while protocols such as Secure CoAP protect the application conversation itself. In other words, OpenThread gives you secure networking, but strong product design still requires secure application protocols on top.
From an embedded-software perspective, the interesting part is that security is not "added later in the cloud." Device identity, network admission, credential storage, and persistent settings are part of the firmware design from the beginning. That is why the OpenThread PAL includes entropy and non-volatile storage as first-class platform requirements.
Official source: OpenThread PAL guide
The PAL guide explicitly calls out the entropy API as maintaining security assets for the network, including AES-CCM nonces and other random values. This is why many production platforms pair OpenThread with hardware random generators, secure storage blocks, or cryptographic accelerators: not because the stack requires vendor lock-in, but because those features improve the security quality of the port.
Reliability comes from the mesh behavior itself. A Thread network can survive node loss, promote eligible devices into routing roles, and keep sleepy endpoints attached through parents, which is very different from a simple point-to-point radio link.
That does not make the network invulnerable. A real deployment still has to think about denial-of-service conditions, bad radio environments, reset behavior, and credential handling during manufacturing and updates. But OpenThread starts from a much stronger foundation than ad hoc plaintext radio protocols because security, commissioning, and network repair are already part of the architecture.
OpenThread belongs in Embedded Software, not only in Linux or networking sections, because the protocol is tightly coupled to firmware concerns:
- radio driver correctness
- timer precision
- ISR and task scheduling behavior
- persistent settings
- power states and sleepy-device timing
- serial buses used for CLI or Spinel
If your UART path drops bytes, your RCP host design fails. If your timer or alarm implementation is wrong, the mesh behavior becomes unstable. If your power model is wrong, your sleepy node either burns too much current or falls off the network.
This is exactly the type of protocol that turns "I can write drivers" into "I can build a networked embedded product."
| Roadmap area | How OpenThread connects |
|---|---|
| ARM MCU + CMSIS / HAL | You need working radio, timer, UART/SPI, entropy, and settings drivers underneath the stack |
| FreeRTOS | Thread nodes often run in RTOS-based firmware, so task structure, event loops, queues, and power-aware scheduling matter |
| UART / SPI | These buses are used not just for sensors, but also for CLI and Spinel host-controller links |
| Embedded Linux | OTBR and ot-daemon are Linux-host examples of the RCP architecture |
| Jetson deployment | A Jetson can act as the stronger host while an ESP32-C6 acts as the Thread radio |
OpenThread is therefore a natural bridge between pure MCU work and mixed MCU-plus-Linux systems. If you understand it well, you are better prepared for gateway design, border routers, Matter-style stacks, and multi-processor embedded products.
Flash ot_cli onto an ESP32-C6 and use the CLI to form a one-node Thread network. Practice ifconfig up, thread start, state, and dataset commands until you are comfortable reading the network state directly.
Bring up two Thread-capable boards and verify that one becomes Leader while the other joins as a child or router. Watch how the routing roles and attach behavior change as you reset or power-cycle one node.
Flash ot_rcp and connect it to a Linux host over UART or SPI. Use ot-daemon or OTBR and confirm that the host creates wpan0, can query ot-ctl state, and can start a Thread dataset.
Use OTBR to bridge the Thread mesh to Ethernet, Wi-Fi, or a USB-backed Linux bridge. This is where OpenThread stops being just a radio experiment and becomes a real infrastructure component.