A research-grade mathematical modelling platform implementing three mathematical models for Formula 1 race lines simulation. This project bridges the gap between theoretical racing line algorithms and practical real-time implementation, featuring physics-based simulation, interactive track design with auto-complete features, and performance analysis.
- Abstract
- Project Description
- Key Components
- Racing Line Models
- Project Goals
- Supported Features
- Project Structure
- Installation
- System Architecture
- Results
- Project Poster
- Future Work
- Contributing
- License
- Contact
Racing line optimization is a critical aspect of motorsport performance, determining the fastest path around a circuit. This project implements three distinct mathematical approaches to racing line calculation: a conservative geometric model, a physics-based lap time optimization algorithm, and the research-grade Kapania two-step iterative method which implemenets a late-apex racing strategy.
The platform provides real-time visualization, interactive track design, and comprehensive performance analysis.
Optimal racing line calculation involves complex mathematical optimization considering vehicle dynamics, track geometry, aerodynamic forces, and tire physics. Traditional approaches often simplify these interactions, limiting their applicability to real-world scenarios.
This project addresses the challenge by:
- Multiple Algorithm Implementation: Three distinct approaches from basic geometry to Stanford University's Kapania two-step algorithm for Race Lines.
- Real-Time Computation: FastAPI backend enabling dynamic simulation from the model-engine.
- Physics-Based Modeling: Comprehensive F1 car dynamics including aerodynamics and tire forces
- Interactive Visualization: Paper.js canvas for intuitive track design and result analysis
- Freehand Drawing: Mouse/touch input for custom racing line creation
- Track Boundaries: Automatic computation of track edges based on centerline geometry
- Real-time Feedback: Instant curvature analysis and track parameter display
- F1 Car Dynamics: Mass, aerodynamics, tire forces, and power limitations
- Speed Optimization: Iterative algorithms for lap time minimization
- Multi-Car Support: Simultaneous optimization with collision avoidance
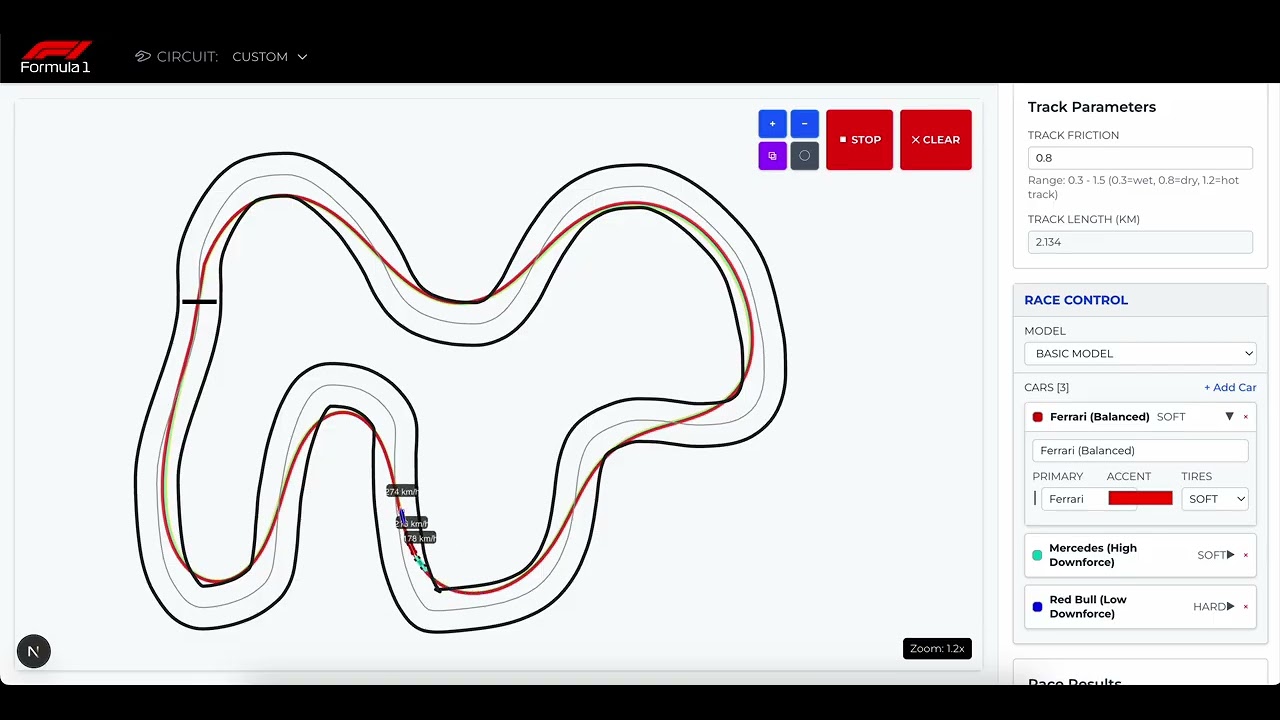
- Basic Model: Geometric approach with conservative track usage (60%)
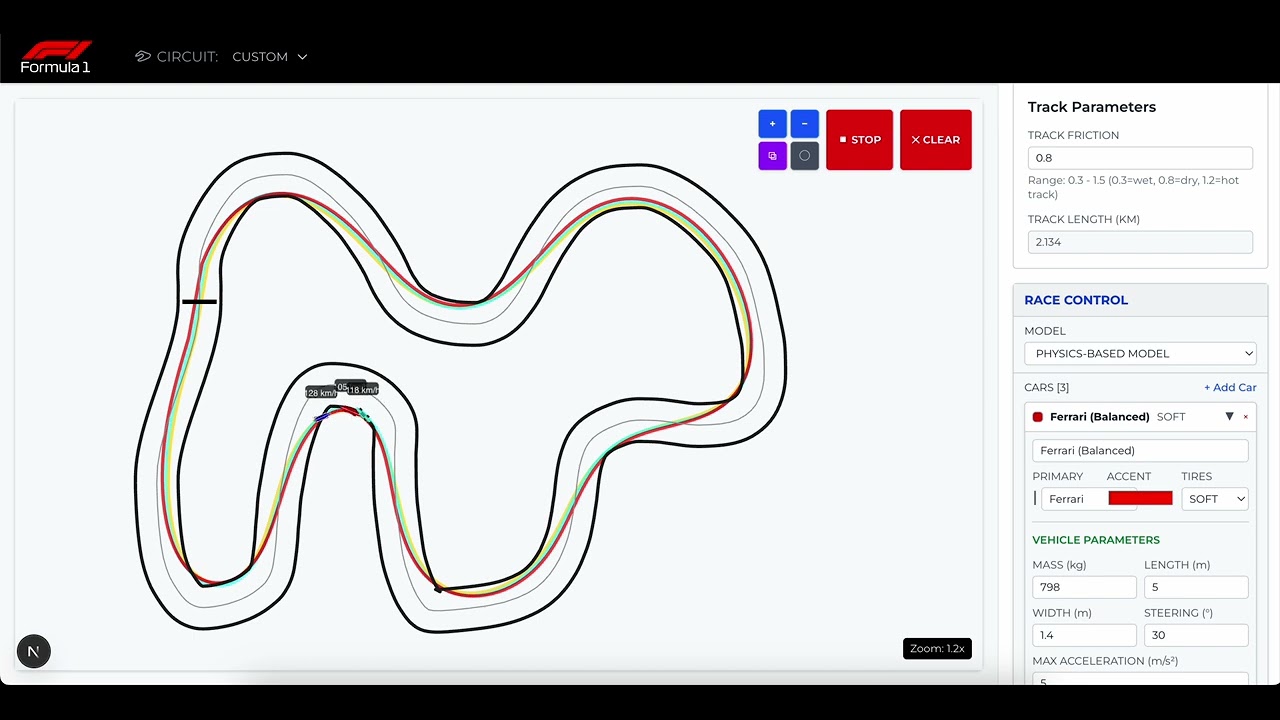
- Physics Model: Lap time optimization with real F1 physics equations (85% track usage)
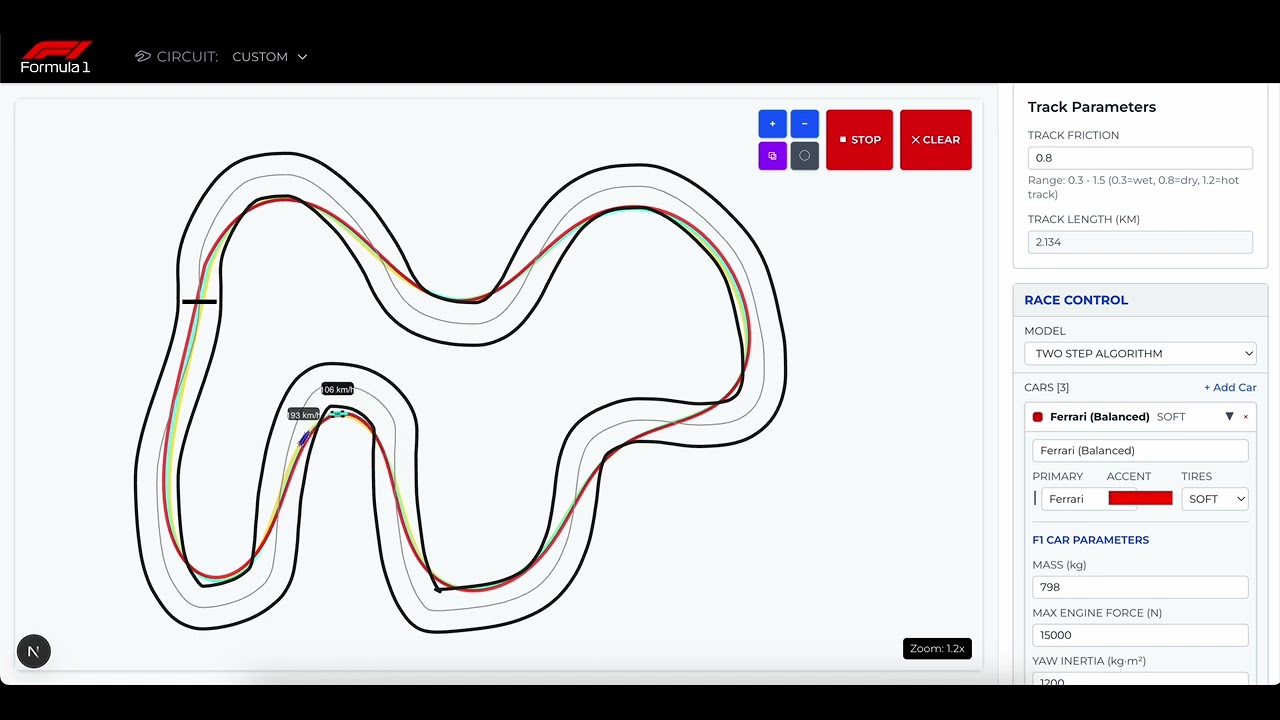
- Kapania Model: Research-grade two-step algorithm with convex optimization (85% track usage)
Purpose: Educational tool and baseline for comparison
- Approach: Simple corner detection with conservative offsets
- Track Usage: 60% (safe margins for learning)
- Performance: Fast computation (~0.1-0.5s per track)
- Best For: Understanding racing line concepts, visualization
Purpose: Realistic racing applications with lap time optimization
- Approach: Iterative physics simulation using F1 car dynamics
- Core Equations:
- Corner Speed:
v_max = √(μ × (mg + F_downforce) / (m × κ)) - Aerodynamics:
F = 0.5 × ρ × v² × C × A - Lap Time:
T = ∫(1/v) ds
- Corner Speed:
- Performance: Medium computation (~1-3s per track)
- Best For: Performance optimization, realistic racing scenarios
Purpose: Research-grade precision based on Stanford University research
- Approach: Forward-backward integration + convex path optimization
- Method: Two sequential optimization problems solved iteratively
- Convergence: Typically 3-4 iterations for optimal solution
- Performance: Slower computation (~2-5s per track)
- Best For: Research applications, maximum precision
- Custom track drawing with Paper.js canvas
- Real-time curvature computation and analysis
- Track boundary generation from centerline
- Physical parameters (mass, dimensions, inertia)
- Aerodynamic properties (drag, downforce coefficients)
- Performance limits (power, acceleration, braking)
- Three distinct mathematical approaches
- Real-time lap time calculation
- Multi-car racing line separation
- Gaussian smoothing for professional appearance
- Speed profile visualization
- Lap time comparison between models
- Track usage statistics
- Performance metrics dashboard
mathematical-modelling-of-race-lines/
├── backend/ # FastAPI Optimization Engine
│ ├── data/
│ │ └── track_data.py # 11+ F1 circuit definitions
│ ├── schemas/
│ │ ├── track.py # Data models and validation
│ │ └── response.py # API response schemas
│ ├── simulation/
│ │ ├── algorithms/ # Racing line models
│ │ │ ├── base_model.py # Abstract base class
│ │ │ ├── basic_model.py # Geometric approach
│ │ │ ├── physics_model.py # Physics optimization
│ │ │ └── kapania_model.py # Two-step algorithm
│ │ ├── aerodynamics.py # F1 aerodynamic calculations
│ │ ├── curvilinear_coordinates.py # Track geometry system
│ │ └── optimizer.py # Main orchestration engine
│ ├── tests/ # Testing & analysis
│ │ └── models/ # Algorithm testing and validation
│ ├── database.py # PostgreSQL configuration
│ ├── main.py # FastAPI application
│ └── requirements.txt # Python dependencies
├── frontend/ # Next.js Interactive Interface
│ ├── src/
│ │ ├── app/
│ │ │ ├── page.tsx # Landing page with F1 branding
│ │ │ └── track-designer/ # Main application interface
│ │ ├── components/
│ │ │ ├── CanvasDrawPaper.tsx # Paper.js drawing canvas
│ │ │ ├── TrackControl.tsx # Track parameter controls
│ │ │ ├── CarControl.tsx # Vehicle configuration
│ │ │ └── Header.tsx # F1-themed navigation
│ │ ├── lib/
│ │ │ └── dataStore.ts # Local storage management
│ │ └── types/
│ │ └── index.ts # TypeScript definitions
│ ├── public/
│ │ └── F1-logo.svg # Project branding
│ └── package.json # Node.js dependencies
├── docs/ # Research Documentation
│ ├── models/
│ │ ├── physics-based-model.md # Physics implementation details
│ │ ├── kapania-two-step-algorithm.md # Stanford research implementation
│ │ └── README.md # Model comparison guide
│ ├── demo/
│ │ └── physics-based/ # Component demonstrations
│ │ ├── 01_corner_speed_calculation.py
│ │ ├── 02_straight_speed_calculation.py
│ │ ├── 03_late_apex_strategy.py
│ │ ├── 04_lap_time_optimization.py
│ │ └── 05_complete_physics_integration.py
│ └── poster/ # Research presentation materials
│ ├── poster.md # Academic documentation
│ ├── Poster_MathModellingForRaceLines.pdf
│ └── images/ # Generated visualizations
└── README.md # This file
- Node.js: Version 18 or higher
- Python: Version 3.8 or higher
- PostgreSQL: Version 15 or higher
- npm: Version 8 or higher
- Git: For repository cloning
docker-compose upgit clone https://github.com/ACM40960/mathematical-modelling-of-race-lines.git
cd mathematical-modelling-of-race-lines# Install PostgreSQL
brew install postgresql@15
export PATH="/usr/local/opt/postgresql@15/bin:$PATH"
# Start PostgreSQL service
brew services start postgresql@15
# Create database
createdb f1_tracks_db# Navigate to backend directory
cd backend
# Create virtual environment
python -m venv venv
source venv/bin/activate # On Windows: venv\Scripts\activate
# Install dependencies
pip install -r requirements.txt# Navigate to frontend directory
cd ../frontend
# Install dependencies
npm install# Terminal 1: Backend API
cd backend
export PATH="/usr/local/opt/postgresql@15/bin:$PATH"
python3 -m uvicorn main:app --reload --port 8000
# Terminal 2: Frontend Application
cd frontend
npm run dev- Frontend: http://localhost:3000
- API Documentation: http://localhost:8000/docs
- Interactive API: http://localhost:8000/redoc
- Windows Users: Replace
source venv/bin/activatewithvenv\Scripts\activate - Linux Users: Ensure PostgreSQL is installed via package manager (
sudo apt-get install postgresql) - Database Issues: Run
brew services restart postgresql@15if connection fails - Port Conflicts: Use
lsof -ti:8000 | xargs kill -9to free backend port
graph LR
subgraph "Frontend (Next.js)"
A["Track Designer<br/>Canvas Drawing"]
B["Parameter Analysis<br/>Model Controls"]
end
subgraph "Backend (FastAPI)"
D["API Endpoints<br/>/optimize, /tracks"]
E["Racing Line Optimizer<br/>Model Orchestration"]
F["Track Processing<br/>Curvature & Geometry"]
end
subgraph "Database (PostgreSQL)"
J["Track Storage<br/>Predefined F1 Circuits"]
end
subgraph "Racing Line Models"
G["Basic Model<br/>Simple Geometry"]
H["Physics Model<br/>Lap Time Min"]
I["Kapania Model<br/>2 Step Algorithm"]
end
A --> D
B --> D
D --> J
D --> E
E --> F
F --> G
F --> H
F --> I
G --> E
H --> E
I --> E
E --> D
style A fill:#ffffff,stroke:#000000,stroke-width:2px,color:#000000
style B fill:#ffffff,stroke:#000000,stroke-width:2px,color:#000000
style D fill:#ffffff,stroke:#000000,stroke-width:2px,color:#000000
style E fill:#ffffff,stroke:#000000,stroke-width:2px,color:#000000
style F fill:#ffffff,stroke:#000000,stroke-width:2px,color:#000000
style G fill:#ffffff,stroke:#000000,stroke-width:2px,color:#000000
style H fill:#ffffff,stroke:#000000,stroke-width:2px,color:#000000
style I fill:#ffffff,stroke:#000000,stroke-width:2px,color:#000000
style J fill:#ffffff,stroke:#000000,stroke-width:2px,color:#000000
- Basic Model: Smooth, conservative lines ideal for understanding racing concepts
- Physics Model: Aggressive optimization with realistic F1 car dynamics
- Kapania Model: Maximum precision with guaranteed convergence properties
Our research has been compiled into a comprehensive academic poster presentation:
Additional poster materials:
- Poster Documentation - Detailed methodology and findings
- Generated Images - Algorithm visualization outputs
- Machine learning integration for adaptive optimization
- Real-time weather and track condition modeling
- Advanced multi-car racing scenarios with strategic considerations
- Mobile application development for tablet-based track design
- Cloud deployment for collaborative research and education
- Integration with racing simulators and real telemetry data
- Validation against real F1 telemetry data
- Extension to other motorsport categories (MotoGP, Endurance)
- Development of real-time optimization for autonomous racing
We welcome contributions from researchers, developers, and motorsport enthusiasts!
- Addition of other well known racing strategies. (What's implemented now is the late-apex strategy)
- Frontend user experience improvements - Like Store tracks using DBs
- Testing and validation with real-world data
- Fork the repository
- Create a feature branch (
git checkout -b feature/new-algorithm) - Implement changes with comprehensive testing
- Submit pull request with detailed description
- Follow PEP 8 for Python code
- Use TypeScript for all frontend development
- Include unit tests for new algorithms
- Document mathematical foundations and implementation details
This project is developed for educational and research purposes in mathematical modeling and racing line optimization. See the LICENSE file for details.
- Developers: Joel Thomas Chacko (24220504), Sarosh Farhan (24210969)
- Project: Mathematical Modelling of Race Lines
- Institution: University College Dublin
- Course: ACM40960 - Mathematical Modelling
Feel free to fork and submit a pull request.